В рамках первого этапа НИОКР были достигнуты следующие результаты:
1. разработаны два алгоритма автоматизации разметки изображений:
- алгоритм поиска экземпляров объекта в пространственной/ пространственно-временной окрестности выделенного на заданном изображении объекта;
- алгоритм предсказания местоположений и размеров объектов заданных классов на текущем кадре видеопотока;
3. проведен анализ существующих интеллектуальных и неинтеллектуальных алгоритмов автоматической разметки изображений;
4. подготовлены два тестовых датасета изображений и видеопотоков для валидации разработанных алгоритмов на последующем этапе работы;
5. разработан тестовый интерфейс интеллектуальной системы разметки изображений.
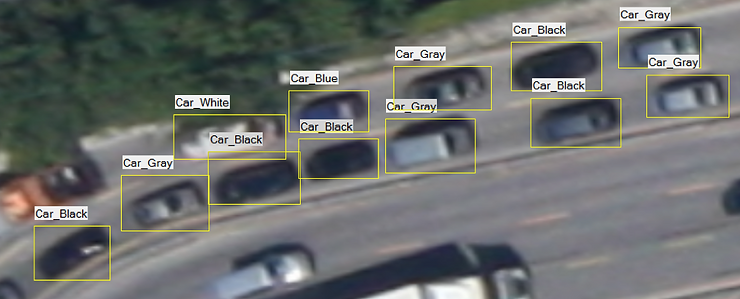
Пример изображения с большим скоплением ТС

Работы выполнены полностью и в срок.